Sota Shimizu, Ph.D.
Professor,
Aichi University of Technology
Department of Media Informatics 50-2 Manori, Nishihasama-cho,
Gamagori, Aichi, 443-0047, Japan
Home
Information
Research
Papers
Links
Contact
Current research interest:
The human eye has a 120-degree wide field of view horizontally (by
a single eye). Its visual
acuity is the highest in the central field of view and decreases rapidly
towards periphery [1]. Thus,
it means that there exists an explicit attention region in the field of
view. By combining eye
movement, we can observe an object as more in detail as possible and as
with small amount of information as possible. My current research interest is to
know a mechanism of the human brain-vision system comprising such a smart
bio-sensor.
[1] S. Shimizu, Wide-Angle Foveation for All-Purpose Use,
IEEE/ASME Transactions on Mechatronics, Vol.13, Issue 5, pp.587-597
(2008.10) PDF
1. Bio-inspired Fovea Vision Sensor:
Figure 1 shows a picture of a developed fovea sensor, where a
special made wide-angle lens is attached with a commercially-available
area sensor. This
bio-inspired artificial vision sensor is applicable for all-purpose use,
e.g., surveillance, end scope, robot control, and etc., just by a single
sensor. Figure 2 shows a
foveated input image from this sensor. One of the most remarkable
advantages of this unique vision system is to reduce the number of data
drastically in the entire field of view. Moreover, the fovea sensor
realizes both wide-angle field of view and high resolution in the central
field of view, simultaneously.
Although a couple of methods have been proposed to acquire such a
foveated image, an optical approach is the best for the highest resolution
in the central field of view.
We can extract a log-polar image, which is useful for pattern
recognition due to its rotation and scale-invariant properties, from the
foveated input image very easily.
one of the most beautiful and rational ways to acquire such an
image, on earth. Fig.3 shows
the extracted log-polar image.
A new fovea vision sensor is being developed currently in our
laboratory.
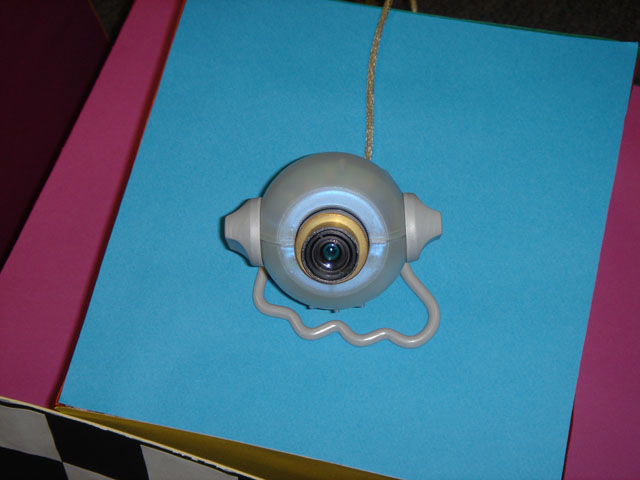
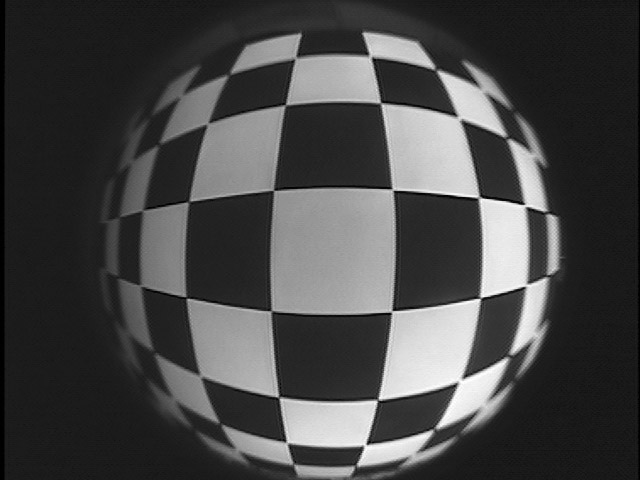
Fig.1 Fovea Sensor
Fig.2 Foveated input
image
![]()
Fig.3
Extracted log-polar image
2. Eye Movement Analysis:
It is quite essential for fovea vision to know how the human look
at and see the object. Thus,
eye movement data are measured using an eye-tracking device and are
analyzed paying attention to gaze decision-making.
![]()
Fig.4
Experimental scene using an eye-tacking device
3. Mobile Robot Navigation based on Multi-functional Use of
Fovea Sensor:
Visual information acquired from the fovea sensor can be applied
for various tasks simultaneously and cooperatively. Paying attention to all-purpose
use of the foveated image, a mobile robot is navigated autonomously using
a stereo camera head which can change view directions of 2 fovea
sensors. Figures 5, 6, and 7
show a picture of the mobile robot, the stereo camera head, and an example
of multi-functional use of the foveated input image. In case of Fig.7, the central and
peripheral fields of view are used for 3D measurement and localization,
respectively.
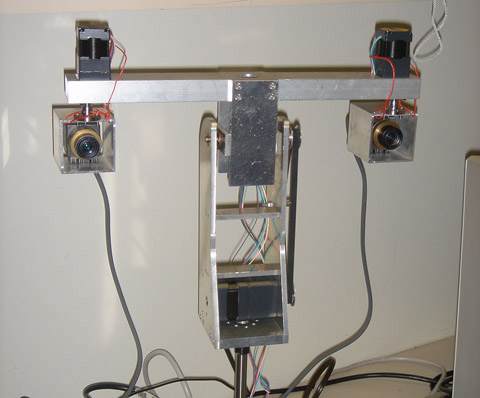
Fig.5 Mobile robot
Fig.6 Stereo camera
head fovea sensors
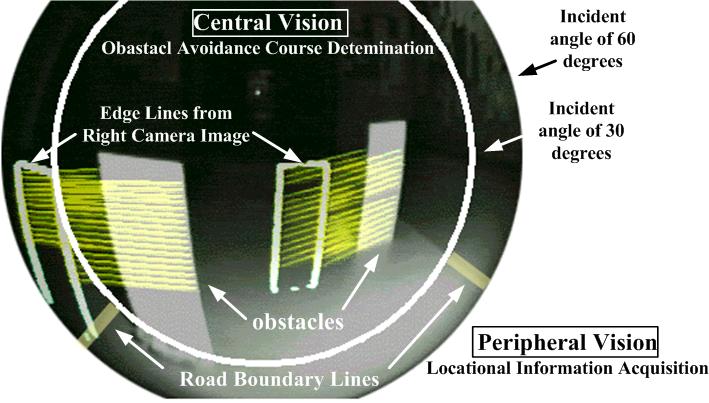
Fig.7 An example of multi-functional use
of the foveated input image
4. Space-variant Data Processing:
Figure 8 shows 3 images having different distributions of
non-uniform spatial resolution.
We, human beings, can recognize that these three images are the
same intuitively due to our flexible and robust brain structure. However, we often need to use
different ways in order to reduce a loss of both their high spatial
resolution and wide field of view when they are compared computationally
using signal processors.


Fig.8 Comparison
of images with non-uniform spatial resolution
5. Liquid-Crystal Wide Angle Fovea Lens:
Under
Construction
sota_at_ieee.org
Last
modified: Tue Dec 12 21:00:00 JST 2024